Revisiting the problem of recovering functions in ℝn by integration on k Dimensional planes
Received: 19-Jan-2018 Accepted Date: Feb 21, 2018; Published: 22-Feb-2018, DOI: 10.37532/2752-8081.18.2.4
Citation: Salman Y. Revisiting the problem of recovering functions in ℝn by integration on k Dimensional planes. J Pur Appl Math. 2018;2(1):12-19.
This open-access article is distributed under the terms of the Creative Commons Attribution Non-Commercial License (CC BY-NC) (http://creativecommons.org/licenses/by-nc/4.0/), which permits reuse, distribution and reproduction of the article, provided that the original work is properly cited and the reuse is restricted to noncommercial purposes. For commercial reuse, contact reprints@pulsus.com
Abstract
The aim of this paper is to present inversion methods for the classical Radon transform which is defined on a family of k dimensional planes in â„Ân where 1≤k≤n–2. For these values of k the dimension of the set  , of all k dimensional planes in â„Ân, is greater than n and thus in order to obtain a well-posed problem one should choose proper subsets of . We present inversion methods for some prescribed subsets of which are of dimension n.
, of all k dimensional planes in â„Ân, is greater than n and thus in order to obtain a well-posed problem one should choose proper subsets of . We present inversion methods for some prescribed subsets of which are of dimension n.
Keywords
Integer; Euclidean space; Hyperplanes; Subset
For an integer n≥2 denote by ℝn the n dimensional Euclidean space. For p∈ℝn and r≥0 denote by|
S (p , x) ={ x ∈ℝn:|s– p |= r }
the hypersphere in ℝn with the center at p and radius r. Let  be the unit sphere in ℝn and for every ψ∈Sn-1 denote by
be the unit sphere in ℝn and for every ψ∈Sn-1 denote by  the great n–2 dimensional subsphere of Sn-1 which is orthogonal to ψ:
the great n–2 dimensional subsphere of Sn-1 which is orthogonal to ψ:

where ❬,❭ denotes the usual inner product in ℝn. For an integer k satisfying 1≤k≤n–1 denote by and by respectively the families of all k dimensional planes (k planes for short) and k dimensional subspaces (i.e., k planes passing through the origin) in ℝn.
respectively the families of all k dimensional planes (k planes for short) and k dimensional subspaces (i.e., k planes passing through the origin) in ℝn.
For a continuous function f, defined in ℝn, define the k dimensional Radon transform  of f by
of f by

Where dmΣ denotes the standard infinitesimal area measure on the k plane Σ.
The main problem and known results
The aim of this paper is to find inversion methods for the k dimensional Radon transform  in case where n≥3 and 1≤k≤n–2. That is, we would like to express a function f in question via its k dimensional Radon transform .
in case where n≥3 and 1≤k≤n–2. That is, we would like to express a function f in question via its k dimensional Radon transform .
In case where k=n–1 the k dimensional Radon transform  coincides with the classical Radon transform R which integrates functions on the set of all hyperplanes in ℝn. There is an extensive literature regarding the classical Radon transform where the first results can be tracked down to 1917 when J. Radon showed in [1] that any differentiable function f in ℝ3 can be recovered from its Radon transform
coincides with the classical Radon transform R which integrates functions on the set of all hyperplanes in ℝn. There is an extensive literature regarding the classical Radon transform where the first results can be tracked down to 1917 when J. Radon showed in [1] that any differentiable function f in ℝ3 can be recovered from its Radon transform  (i.e., where our data consists of the integrals of f on hyperplanes in ℝ3). Further results concerning the problem of recovering a function f from in higher dimensions as well as finding uniqueness and range conditions for R have been obtained by many authors and we do not intend to give an exhaustive list of references. Some classical results can be found in [2-4].
(i.e., where our data consists of the integrals of f on hyperplanes in ℝ3). Further results concerning the problem of recovering a function f from in higher dimensions as well as finding uniqueness and range conditions for R have been obtained by many authors and we do not intend to give an exhaustive list of references. Some classical results can be found in [2-4].
For the case where 1≤k≤n–2 and where  is defined on the whole family of k planes in ℝn then obviously the reconstruction problem becomes trivial since one can use known inversion methods for the case where integration is taken on hyperplanes in ℝn and the fact that each such hyperplane is a disjoint union of k planes. However, if 1≤k≤n–2 then
is defined on the whole family of k planes in ℝn then obviously the reconstruction problem becomes trivial since one can use known inversion methods for the case where integration is taken on hyperplanes in ℝn and the fact that each such hyperplane is a disjoint union of k planes. However, if 1≤k≤n–2 then  and the inversion problem becomes over determined. Thus, in order to obtain a well posed problem one should restrict the domain of to a subset
and the inversion problem becomes over determined. Thus, in order to obtain a well posed problem one should restrict the domain of to a subset  for which
for which .
.
An extensive work and results concerning the problem of determining a function f from in case where the later transform is restricted to various subsets  of dimension n have been obtained in [5,6]. In (6, Chap. 4.2) a reconstruction formula was found in case where
of dimension n have been obtained in [5,6]. In (6, Chap. 4.2) a reconstruction formula was found in case where  is restricted to a subset
is restricted to a subset  of lines which meet a curve C⊂P(ℝn) (where P(ℝn) is the projective space of all lines in ℝn which pass through the origin) at infinity. The dimension of this subset coincides with the dimension of n in case where n=3.
of lines which meet a curve C⊂P(ℝn) (where P(ℝn) is the projective space of all lines in ℝn which pass through the origin) at infinity. The dimension of this subset coincides with the dimension of n in case where n=3.
In (5, Chap. 2.6) and (6, Chap. 4.3) a reconstruction formula was obtained for in case where (3,1) is the set of all lines which intersect a curve
(3,1) is the set of all lines which intersect a curve  which satisfies the completeness condition: each hyperplane which passes through supp(f) intersects Γ transversely at a unique point. In (6, Chap. 4.4) the more general case, where lines are tangent to a given surface in ℝ3, was considered (every curve Γ=Γ(s) can be approximated by the family of surfaces
which satisfies the completeness condition: each hyperplane which passes through supp(f) intersects Γ transversely at a unique point. In (6, Chap. 4.4) the more general case, where lines are tangent to a given surface in ℝ3, was considered (every curve Γ=Γ(s) can be approximated by the family of surfaces  . For cases where integration is taken on planes of dimension k>1 it is shown in (6,Chap. 5.1) how to obtain an inversion formula in case where
. For cases where integration is taken on planes of dimension k>1 it is shown in (6,Chap. 5.1) how to obtain an inversion formula in case where  consists of k planes of the form x+L where L∈C, x∈LT and C is a k dimensional manifold in .
consists of k planes of the form x+L where L∈C, x∈LT and C is a k dimensional manifold in .
Main results
In this paper we present three inversion methods for three different prescribed subsets  of where for each such subset the problem of recovering a function f, defined in ℝn, from its k dimensional Radon transform is well posed (i.e., the dimension of the manifold H` of k planes is equal to n).
of where for each such subset the problem of recovering a function f, defined in ℝn, from its k dimensional Radon transform is well posed (i.e., the dimension of the manifold H` of k planes is equal to n).
The first inversion method is obtained for a special subset which is determined by fixing k+1 points x1,…,xk+1 in ℝn in general position. Each k plane in is determined by taking a point p in ℝn, which is in general position with the other fixed points, and then taking the intersection of the k+1 plane passing through p, x1,…,xk+1 and the unique hyperplane which passes through p and its normal is in the direction  . We prove that our inversion problem is well posed and provide an inversion method for each function, whose k dimensional Radon transform is defined on this subset , and which satisfies a decaying condition at infinity. The proof of the reconstruction method is purely geometrical and does not use any analytical tools. We find a family of k+1 planes such that the union of these planes is dense in ℝn and such that for every k+1 plane Σ in this family the set of k planes in , which are contained in Σ, is in fact the set of all k planes in Σ. Thus, we can use known inversion formulas for the classical Radon transform, on each such k+1 plane, in order to reconstruct the function f in question.
. We prove that our inversion problem is well posed and provide an inversion method for each function, whose k dimensional Radon transform is defined on this subset , and which satisfies a decaying condition at infinity. The proof of the reconstruction method is purely geometrical and does not use any analytical tools. We find a family of k+1 planes such that the union of these planes is dense in ℝn and such that for every k+1 plane Σ in this family the set of k planes in , which are contained in Σ, is in fact the set of all k planes in Σ. Thus, we can use known inversion formulas for the classical Radon transform, on each such k+1 plane, in order to reconstruct the function f in question.
The second inversion method is obtained for the subset  (3,1) of all lines in ℝ3 which are at equal distance from a fixed given point p. We show that our problem is well posed (i.e., in this case
(3,1) of all lines in ℝ3 which are at equal distance from a fixed given point p. We show that our problem is well posed (i.e., in this case  ) and obtain an inversion method using expansion into spherical harmonics and exploiting the fact that is invariant under rotations with respect to the point p. Observe that can be also described as the set of lines which are tangent to a given sphere with center at p.
) and obtain an inversion method using expansion into spherical harmonics and exploiting the fact that is invariant under rotations with respect to the point p. Observe that can be also described as the set of lines which are tangent to a given sphere with center at p.
The third inversion method is obtained for the subset (3,1) of all lines in ℝ3 which have equal distances from two given fixed points x and y in ℝ3 (x≠y). Again, we show that our problem is well posed and for the inversion method we exploit the fact that is invariant under rotations with respect to the line l passing through the points x and y. Using this invariance property of we take any hyperplane H, which is orthogonal to l, and expand the restriction f|H, of the function f in question, into Fourier series with respect to the angular variable in H.
We would like again to emphasize that the problem of recovering functions from integration on k planes, which belong to an n dimensional manifold , is not new and the manifolds of lines, corresponding to the second and third inversion problems described above, were already considered in [5,6]. However, the inversion methods presented in this paper are new and can provide new insights on developing other reconstruction methods for more complex subsets of k planes in .
Exact formulations and proofs of the main results
In this section we formulate and prove the inversion methods for the problem of recovering a function f from integration on any subset of k planes from the three subsets which were described in the previous section. For the first subset of k planes we do not give an explicit inversion formula but instead we just assert that every function can be reconstructed from integration on k planes from whereas the inversion method is described in the proof itself. This is because we relyon the reduction to the classical Radon transform from which one can choose many known inversion formulas for this integral transform. The reconstruction methods for the other two subsets are given explicitly.
The description of the subsets of k planes and the inversion methods, for the three subsets described above, are given in the following three subsections. Each subsection is self-contained and the mathematical tools, the main results and their proofs for the reconstruction formulas, for each one of these three subsets, are formulated individually in each subsection.
The case of integration on k planes determined by choosing k+1 points in ℝn
For k+1 arbitrary points x1,…,xk+1 in ℝn which are assumed to be in general position, i.e., which satisfy the condition
 [2.1]
[2.1]
denote by H{x1,…,xk+1} the unique k plane passing through the points x1,…,xk+1. For every x0∈ℝn\{0} denote by Hx0 the unique hyperplane whose closest point to the origin is x0, i.e.,
Hx0={x∈ℝn:⟨x– x0,x0⟩=0}.
For every m points x1,…,xm in ℝn define the following set
U=U{ x1,…,xm}={x∈ℝn:⟨x–x1,x⟩=…=⟨x–xm⟩=0}
Observe that in particular 0∈U.
We choose the subset H` in the following way. We fix k+1 points x1,…,xk+1 in ℝn which are assumed to be in general position and then, for each x0∈ℝn\ (H{x1,…,xk+1}∪U{ x1,…,xk+1}), we define Σx0 to be the unique k plane which is the intersection of the n–1 dimensional hyperplane Hx0 with the k+1 plane H{x0,x1,…,xk+1}. More explicitly, we define

Observe that for every plane Σx0 we have that x0∈Σx0.
Now we need to show that the dimension of the set = x1...,xk+1 is equal to n and that each plane in is of dimension k.
To prove that  observe that since is parameterized via the set ℝn \(H{x1,…,xk+1}∪U{ x1,…,xk+1}) which is of dimension n we have that dimH0≤n. In order to prove that we will prove that for any two different points x’ and x’’ the planes Σx’ and Σx’’ are different. Indeed, since Σx’ ⊂Hx’ it follows that its closest point to the origin is x’ and in the same way x’’ is the closest point of Σx’’ to the origin. Hence, if Σx’ =Σx’’ it follows that both x’ and x’’ are the closest points of a k plane to the origin and they are both different. This obviously leads to a contradiction.
observe that since is parameterized via the set ℝn \(H{x1,…,xk+1}∪U{ x1,…,xk+1}) which is of dimension n we have that dimH0≤n. In order to prove that we will prove that for any two different points x’ and x’’ the planes Σx’ and Σx’’ are different. Indeed, since Σx’ ⊂Hx’ it follows that its closest point to the origin is x’ and in the same way x’’ is the closest point of Σx’’ to the origin. Hence, if Σx’ =Σx’’ it follows that both x’ and x’’ are the closest points of a k plane to the origin and they are both different. This obviously leads to a contradiction.
To show that for each x0∈ℝn the plane Σx0 is of dimension k we first observe that since x0∈Σx0 then Σx0 is a nonempty intersection of a hyperplane and a k+1 plane in ℝn. Hence, dimΣx0 is equal to k or k+1 where the later case occurs when H{ x0,…,xk+1} is contained in Hx0. This will imply in particular that
x1,…,xk+1∈Hx0 and thus
⟨x0–x1,x0⟩=…=⟨ x0– xk+1,x0⟩=0
which is a contradiction to the assumption that x∉{x1,…,xk+1}. Now, for every function f, defined in ℝn, which decays to zero fast enough at infinity, our aim is to recover f from which is now restricted to the smaller set and thus our problem is well posed. For this we have the following result.
Theorem 2.1: Let f be a function in C∞ (ℝn) (the space of infinitely differentiable functions in ℝn) which satifises the decaying condition f(x)=o(|x|–N) for some N>k+1. Then, f can be recovered from its k dimensional Radon transform restricted to the set of k dimensional planes.
Proof: From here and after we will assume, without loss of generality, that {xk+1–x1,…xk+1–xk} is an orthonormal set. Since if this is not the case then by equation [2.1] it follows that there exists an orthonormal set of vectors {y1,…,yk} such that
span{y1,…,yk}=span{xk+1–x1,…xk+1–xk}.
Hence, if we denote xi*= xk+1–yi then it is easily verified that
H{x1,…,xk,xk+1}=H{x1 *,…,xk *, xk+1}.
Hence, for the set {x1 *,…,xk *, xk+1} we obtain the same set of k planes, i.e.,
 and we also have that {xk+1–x1 *,… xk+1– xk *} is an orthonormal set.
and we also have that {xk+1–x1 *,… xk+1– xk *} is an orthonormal set.
The proof of Theorem 2.1 is divided into 5 parts.
In the first part we find necessary and sucffient conditions on a point x0 in ℝn\(H{x1,…,xk+1}∪U{x1,…,xk+1}) so that the k plane Σx0 is contained in a given k+1 plane Σ’.
In the second part we define a special subset  of k+1 planes.
of k+1 planes.
In the third part we find, with the help of the first part, necessary and sufficient conditions on a point x0 in ℝn\(H{x1,…,xk+1}∪U{x1,…,xk+1}) for the k plane Σx0 to be contained in a given k+1 plane in  .
.
In the fourth part we show that the union of all the k+1 planes in is the whole space ℝn.
Lastly, in the fifth part we show that the k planes in , which are contained in a given k+1 plane Σ’ in , are in fact all the k planes in Σ’ and thus the function f, in Theorem 2.1, can be recovered on Σ’. Since, by the fourth part, the union of the k+1 planes in is the whole space ℝn it follows that f can be recovered in ℝn. This will finish the proof of Theorem 2.1.
Finding conditions on the point x0 so that the k plane Σx0 is contained in a given k+1 plane Σ’: For x0∈ℝn \(H{x1,…,xk+1}∪U{x1,…,xk+1}) observe that the k plane Σx0 in can be parameterized as follows

From the above parametrization we obtained for Σx0 it follows that for every ω∈Sn-1 and c∈ℝ the k plane Σx0 is contained in the hyperplane ⟨x,ω⟩=c if and only if the following two conditions are satifised
i. ⟨x,ω⟩=c,
ii. There exists an index 1≤i≤k+1 such that ⟨xi–x0,x0⟩≠0 and
⟨xi–x0,x0⟩⟨xj–x0,ω⟩=⟨xj–x0, x0⟩⟨xi–x0, ω⟩ for j=1,…,i–1,i+1,…,k+1.
Now, for a given k+1 plane Σ’ we would like to nd necessary and sufficient conditions on x0 so that the k plane Σx0 is contained in Σ’. Let us assume that Σ’ is given by the following system of equations
⟨x, ωi⟩=μi,i=1,…,n–k–1
where ω1,…ωn–k–1 form an orthonormal set and where μ1,…,μn–k–1∈ℝ. From the above analysis it follows that the k plane Σx0 is contained in a k+1 plane Σ’, given by the intersection of all hyperplanes given by [2.2], if and only if the following two conditions are satifised
(i*) ⟨x0,ωi⟩= μi,i=1,…,n–k–1,
(ii*) For every 1≤i’≤n–k–1there exists an index 1≤i≤k+1 such that ⟨xi–x0, x0⟩≠0 and such that
⟨xi–x0,x0⟩⟨xj–x0, ωi’⟩=⟨xj–x0,x0⟩⟨xi–x0, ωi’⟩ for j=1,…,i–1,i+1,…,k+1.
Defining the set of k+1 planes: Now, let us look only on k+1 planes given as the intersection of the n–k–1 hyperplanes given by [2.2] where ω1,…,ωn–k–1 satisfy
⟨xk+1– xi,ωj⟩=0,i=1,…k,j=1,n–k–1 [2.3]
and where the parameters μ1,…,μn–k–1 are then given by the following equations
μj=⟨xk+1,ωj⟩(=⟨ xi,ωj⟩,i=1,…,k),j=1,…,n–k–1 [2.4]
Denote this family of k+1 planes by . That is,
:ω=(ω1,…,ωn–k–1), where ωi,i=1,…,n–k–1 form an orthonormal set in Sn-1 and belong to span{xk+1–x1– x1,… xk+1–xk}┴}.
Finding conditions on the point x0 so that the k plane Σx0 is contained in the k+1 planeΣ’ω in : Let us take a k+1 plane Σ’ ω in . Then, for a k plane Σx0 to be contained in Σ’ ω the point x0 in ℝn\(H{x1,…, xk+1}∪U{x1,…,xk+1}) needs to satisfy only condition (i*) since then condition (ii*) is also satisfied. Indeed, since x0∉U{x1,…, xk+1} there exists an index i such that ⟨x1– x0, x0⟩≠0. Using the fact that for Σ’ ω we have, from equation [2.3], that ⟨xi,ωi⟩=⟨xk+1,ωi’⟩, it follows that
⟨xi–x0,ωi’⟩=⟨xi,ω i’⟩–⟨x0,ω i’⟩=⟨xk+1,ω i’⟩– μ i’=0
where in the second passage we used condition (i*) and in the last passage we used equation [2.4]. In the same way we can show that ⟨xj–x0,ω i’⟩=0 and thus condition (ii*) is obviously satisfied.
Thus, it follows that the k plane Σx0 is contained in the k+1 plane Σ’ ω in if and only if
⟨x0,ω i⟩=⟨xk+1,ω i⟩,i=1,…,n–k–1.
The k+1 planes in cover the whole space ℝn: Our aim is to reconstruct f on every k+1 plane Σ’ ω in (n,k+1). If this can be done then f can be recovered on the whole of ℝn. Indeed, we only need to show that for every z0∈ℝn there exists a k+1 plane Σ`w in such that z0∈ Σ`w. That is, we need to find n–k–1 orthonormal vectors ω1,…,ωn–k–1 such that each of them is orthogonal to xk+1– x1,…,xk+1–xk and such that the following equations are satisfied
⟨z0, ω i⟩=⟨xk+1, ωi⟩,i=1,…,n–k–1
That is, the orthonormal system ω1,…,ωn–k–1 needs to be orthogonal to  . Since
. Since is spanned by k+1 vectors it follows that
is spanned by k+1 vectors it follows that and thus
and thus . Thus, we can find an orthonormal system ω1,… ,ωn–k–1 which is in
. Thus, we can find an orthonormal system ω1,… ,ωn–k–1 which is in  . The corresponding parameters μ1,…,μn–k–1 are then uniquely determined by equation [2.4].
. The corresponding parameters μ1,…,μn–k–1 are then uniquely determined by equation [2.4].
Recovering f on each k+1 plane in : Let us take a k+1 plane Σ’ ω in and show how f can be recovered on Σ’ ω. As we previously mentioned, we can assume that {xk+1–x1,…,xk+1–xk} is an orthonormal set. Hence, since the vectors ω1,…,ωn–k–1 also form an orthonormal set then from equation [2.3] it follows that {xk+1–x1,…, xk+1–xk,ω1,…,ωn–k–1} is an orthonormal set. Thus, there exists a rotation A such that A(xk+1–x1)=e1,…, A(xk+1–xk)= ek, Aω1=ek+2,…,Aωn–k–1= en.
Let us choose a point x0∈ℝn\(H{x1,…,xk+1}∪U{x1,…,xk+1}) such that the k plane Σx0 is contained in the k+1 plane Σ’ ω. If we denote x’ 0=Ax0, x’ k+1=Ax k+1 then condition [2.5] is equivalent to
⟨x’,ei+k+1⟩=⟨x’ k+1, ei+k+1⟩,i=1,…,n–k–1. [2.6]
The assumption that x0 is not in the unique k plane which passes through x1,…,xk+1 is equivalent to the assumption that rank {xk+1– x0,xk+1– x1,…,xk+1– xk}=k+1 or equivalently that rank {x’ k+1– x’ 0,e1,…,ek}=k+1 and from equation [2.6] this is equivalent to x’ 0,k+1≠ x’ k+1,k+1. The assumption that x0∉U{x1,…,xk+1} is equivalent to the assumption that there exists an index 1≤i≤k+1 such that ⟨xi–x0,x0⟩≠0 or equivalently that ⟨x’ i–x’ 0,x’ 0⟩≠0 where we denote x’ i=Axi.
Hence, the k plane AΣx0 is contained in the k+1 plane AΣ’ ω if and only if x’ 0=Ax0 has the form
x’ 0=(u,u0), u0=( x’ k+1.k+2,…,x’ k+1,n), u∈ ℝk+1 [2.7]
and which satisfies the following condition
u k+1≠x’k+1,k+1, ∃i,1≤i≤k+1,⟨x’ i– x’ 0, x’ 0⟩≠0
or equivalently the condition
(iii) u k+1≠ x’k+1,k+1∃i,1≤i≤k+1,⟨x’ i–(u,u0),(u,u0)⟩ ≠0
Let us recall again that the k+1 plane Σ’ ω is given by the system of equations
⟨x,ωi⟩=⟨ xk+1,ωi⟩,i=1,…,n–k–1
or equivalently by the system of equations
⟨Ax,ek+i+1⟩=⟨ x’k+1, ek+i+1⟩, i=1,…,n–k–1.
Hence, the k+1 plane AΣ’ ω is given by
AΣ’ ω={(u,u0):u∈ℝ k+1,u0=(x’k+1,k+2,…, x’k+1,n)}
and for this plane we define its origin to be the point (0,u0). Now, we claim that for each point x’0 which is of the form [2.7] and satisfies condition (iii) the closest point of the k plane AΣx0 to the origin in AΣ’ ω is obtained at x’0. Indeed, the closest point of Σx0 to the origin is x0 (since Σx0 ⊂Hx0) and thus the closest point of AΣx0 to the origin is x’ 0=Ax0. Now, if there exists a point x”∈ AΣx0 ⊂AΣ’ ω whose distance to the origin (0,u0) in AΣ’ ω is smaller than that of x’0 then we can assume that x’ 0=(u,u0), x’’ 0=(u’’,u0),u, u’’∈ℝk+1 and where |u’’|<|u|. This will imply that |x’’ 0|< |x’ 0|an so x’’ 0 is a point in AΣx0 whose distance to the origin in ℝn is smaller than that of x’ 0. This is obviously a contradiction.
Hence, for a point x0 such that x’ 0= Ax0 is of the form (u,u0), where u satisfies condition (iii), we have that AΣx0 ⊂ AΣ’ ω and that its closest point to the origin in AΣ’ ω is obtained at x’ 0. This means that if we project the k+1 plane Σ’ ω= ℝk+1 ×{u0} to ℝk+1 then the closest point, of the projection of AΣ’ ω, to the origin 0 in ℝk+1 is obtained at the point u.
Thus, it follows that the projection of AΣx0 to ℝk+1 is the following k dimensional hyperplane
Π u={⟨ x’–u,u⟩=0: x’∈ℝk+1}. [2.8]
Now, the restriction that the point u must satisfy condition (iii) can be omitted since the set of points u which do not satisfy this condition is of co dimension 1 in ℝk+1. Thus, by passing to limits when preforming integration we can obviously obtain the integrals on any hyperplane of the form [2.8]. Thus, we can assume that u∈ℝk+1. Hence, if u= rσ where r≥0, σ∈Sk then the k plane IIu is given by
Π’ r,σ={⟨ x’,σ⟩= r: x’∈ℝk+1}.
Observe that every k dimensional hyperplane in ℝ k+1can be written as Π’ r,σ for some fixed r≥0,σ ∈Sk. Every function in C∞ o(ℝ k+1) which decays to zero faster than |x|–N, N>k+1, at infinity can be recovered from its classical Radon transform (see 7, Chap. 1.3, Theorem 3.1) which integrates the function on every k dimensional hyperplane in ℝ k+1. From our assumption on the function f it follows that the restriction of g = foA–1 to the k+1 plane AΣ’ ω satisfies these conditions and thus it can be recovered on this plane. Equivalently, this means that f can be recovered on Σ’ ω. Thus, Theorem 2.1 is proved.
The case of integration on lines in ℝ3 with a fixed distance from a given point
For r>0, a point p in ℝ3 and a compactly supported continuous function f, defined on ℝ3, we consider the following problem. Suppose that the integrals of f are given on each line whose distance from the point p is equal to r and we would like to recover f from this family Π of lines. Since the intersection of the interior of the sphere S’=S(p,r) with any line in Π is empty then obviously f cannot be recovered inside S’ and thus we can assume that each function in question vanishes inside S’. Without loss of generality we can assume that p=0; r=1. That is, our family Π consists of all the lines which are tangent to the unit sphere S2 and our aim is to recover a continuous compactly supported function, which vanishes inside S2, given its integrals on each line in Π. Since S2 is of dimension two and since, for each point p∈ S2, the family of lines which are tangent to S2 and pass through p is one dimensional it follows that dim Π=3. Hence, our problem is well-posed.
Observe that for a point x∈ℝ3, satisfying |x| ≥1, the family of all lines which are tangent to the unit sphere S2 and pass through x is a cone with the apex at x which is tangent to S2 where the tangency set is a circle on S2. Let us denote by Cx Ʌthe above considered cone and denote by Ʌ the family of all such cones which are obtained by taking points x∈ℝ3 satisfying |x|≥1. Observe that if x=λe3 where λ≥1 then the family Ʌ can be parameterized as follows
Ʌ={A–1C λe3: A∈SO(2), λ≥1}
where SO(2) denotes the group of rotations in ℝ3. For every λ≥1 the cone C λe3 can be parameterized as follows

Now, let f be a continuous function, defined in ℝ3, with compact support. Then, our data consists of the following integrals

Remark 2.2: Observe that with the parametrization [2.9] of the cone C λe3 we have that its innitesimal area measure is given by  . However, in our case the expression dSx given in equation [2.10] is chosen such that
. However, in our case the expression dSx given in equation [2.10] is chosen such that  (i.e., the term |t| is omitted). We can choose dSx in this way since for every λ ≥1 we know the factorization of C λe3 into lines passing through its apex. Each such line, given by the parametrization [2.9],
(i.e., the term |t| is omitted). We can choose dSx in this way since for every λ ≥1 we know the factorization of C λe3 into lines passing through its apex. Each such line, given by the parametrization [2.9],
where the parameter φ is fixed, has infinitesimal length measure given by λdt. Thus, we can just integrate on this family of lines with respect to φ with the infinitesimal angular measure dφ .
Our aim is to recover f from the family of integrals given by equation [2.10]. The inversion formula is given in Theorem 2.3 below. Before formulating and proving Theorem 2.3 we introduce some notations and definitions.
For every integer m ≥0 denote by  the Gegenbauer polynomial of order ½ and degree m.
the Gegenbauer polynomial of order ½ and degree m.
Let TA,A∈SO(2) be the quasi-regular representation of the group So(2). That is, for a function g∈L2 (S2) the operator T acts on g by TA(g)=goA–1.
Let  be an orthonormal complete system of spherical harmonics in S2 and let
be an orthonormal complete system of spherical harmonics in S2 and let  be the components of the representation matrix of T with respect to this family of spherical harmonics. That is
be the components of the representation matrix of T with respect to this family of spherical harmonics. That is
The functions  satisfy the following orthogonality relations (see 8, Chap. 1.5.2).
satisfy the following orthogonality relations (see 8, Chap. 1.5.2).

Now we can formulate Theorem 2.3.
Theorem 2.3: Let f be a continuous function, dened in ℝ3, which has compact support and vanishes inside S2 and let

be the expansion of f into spherical harmonics. Denote

where

 and where
and where is defined on the whole interval [–π,π] by defining
is defined on the whole interval [–π,π] by defining
 .
.
Then, for the following Fourier expansions on the interval [–π,π]

we have that 
Remark 2.4:
In Theorem 2.3 the parameter p’,|p’|≤m can be any parameter which satisfies  . Also, observe that by Theorem 2.3 we can recover the function gm,k and thus we can also recover the function e
. Also, observe that by Theorem 2.3 we can recover the function gm,k and thus we can also recover the function e  which is equivalent of recovering fm,k on [1,∞). Since, by our assumption, f vanishes inside S2 it follows that fm,k vanishes in [0,1] and thus we can extract fm,k on the whole line ℝ. Hence, since we can obtain fm,k for every m≥0.|k|≤m then obviously the function f can be recovered.
which is equivalent of recovering fm,k on [1,∞). Since, by our assumption, f vanishes inside S2 it follows that fm,k vanishes in [0,1] and thus we can extract fm,k on the whole line ℝ. Hence, since we can obtain fm,k for every m≥0.|k|≤m then obviously the function f can be recovered.
Proof of Theorem 2.3: For every A∈SO (2) we have
Using the orthogonality relations for the family of functions  on SO(2) we have that
on SO(2) we have that . Hence, we obtained that
. Hence, we obtained that  where λ≥1 and pj m. Using the parametrization [2.9] of the cone C λe3 we have
where λ≥1 and pj m. Using the parametrization [2.9] of the cone C λe3 we have
 [2.11]
[2.11]
Let α be a point in the interval [–π,π) such that

Every spherical harmonic in S2 satisfies the following identity (see for example [7-9]
 [2.12]
[2.12]
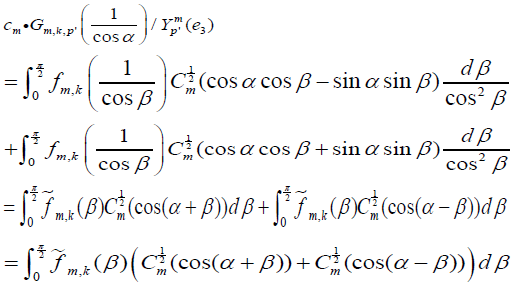
Where ψ ∈S2. Hence, using equations [2.11]-[2.12] and the definition of the parameter cm we have
 [2.13]
[2.13]
Now, observe that there exists an integer p satisfying |p|≤m such that  . Otherwise we can just choose a spherical harmonic Ym of degree m and choose a point ω0∈S2 such that Ym (ω0)≠0. Then, if A is a rotation such that Aω0=e3 then K(ω)=Ym (A–1ω) will also be a spherical harmonic of degree m such that K(e3)≠0. Now, since K can be expanded into spherical harmonics from the family
. Otherwise we can just choose a spherical harmonic Ym of degree m and choose a point ω0∈S2 such that Ym (ω0)≠0. Then, if A is a rotation such that Aω0=e3 then K(ω)=Ym (A–1ω) will also be a spherical harmonic of degree m such that K(e3)≠0. Now, since K can be expanded into spherical harmonics from the family  ,|p|≤m then if
,|p|≤m then if  for every |p|≤m then we will also have K(e3)=0 which is a contradiction.
for every |p|≤m then we will also have K(e3)=0 which is a contradiction.
Let us choose p’,|p’|≤m such that  . Then, from equation [2.13] we have
. Then, from equation [2.13] we have
 [2.14]
[2.14]
Observe that the function  is injective on the intervals (
is injective on the intervals ( and [
and [ ).
).
Hence, we can make the following change of variables
 [2.15]
[2.15]
Extracting the variable t from equation [2.15] we have
In both cases we have  . Thus
. Thus
Denoting λ’=1/λ and making the change of variables x=1=x’ we have
 [2.17]
[2.17]
where 0≤λ’≤1. Observe that both integrals in equation [2.17] converge since for every m≥0,|k|≤m the function fm,k vanishes at infinity (since, by assumption, f is compactly supported). Hence, there is no singularity near x’= 0.
Let us denote λ’=cosα,0≤α≤ π/2 and make the change of variables x’=cosβ. Then, from equation [2.17] we have
where we define
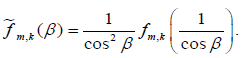
Observe that  is an even function dened on –π=2≤β≤π/2. Since the sum of the Gegenbauer polynomials in the integral [2.18] is an even function of β it follows that
is an even function dened on –π=2≤β≤π/2. Since the sum of the Gegenbauer polynomials in the integral [2.18] is an even function of β it follows that
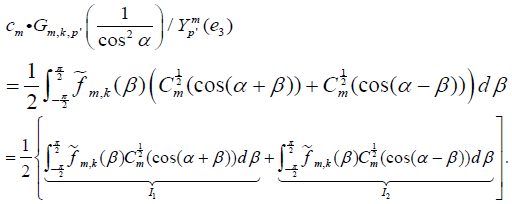 Since is an even function of it follows easily that I1 = I2. Thus,
Since is an even function of it follows easily that I1 = I2. Thus,
 [2.19]
[2.19]
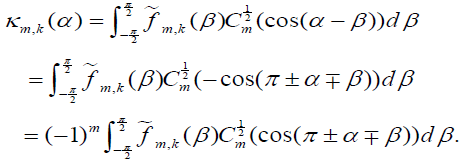
where we denote

Observe that the right hand side of equation [2.19] is given for 0≤α≤π/2, but using the change of variables β↦–β and using the evenness of  it follows that the right hand side of equation [2.19] is an even function of α. Hence,
it follows that the right hand side of equation [2.19] is an even function of α. Hence,  can be extended, as an even function of α to the interval [–π/2,π/2]. The right hand side of equation [2.19] is defined for all α∈[–π,π] and if we denote it by
can be extended, as an even function of α to the interval [–π/2,π/2]. The right hand side of equation [2.19] is defined for all α∈[–π,π] and if we denote it by  then we have that
then we have that
 .
.
Indeed, let α satisfy π/2≤|α|≤π, then we have
Hence, in case where π/2≤α≤π then we choose the sign  and then by making the change of variables β↦– β and using the evenness of we have
and then by making the change of variables β↦– β and using the evenness of we have  . In case where –π≤α≤–π/2 then we choose the sign
. In case where –π≤α≤–π/2 then we choose the sign  and then we can prove in the exact same way that
and then we can prove in the exact same way that . Hence, if we extend the function
. Hence, if we extend the function to the larger domain [–π,π] by defining
to the larger domain [–π,π] by defining  then equation [19] is valid for all α in [–π,π]. Let us define the function gm,k as follows
then equation [19] is valid for all α in [–π,π]. Let us define the function gm,k as follows
Then, from equation [2.19] we have
 [2.20]
[2.20]
Assume now that and gm,k are defined on the whole line ℝ by taking their 2π periodic extensions. Bearing in mind that the convolution h3 of two 2π periodic functions h1 and h2 is defined by  and that the convolution theorem for this type of functions asserts that if
and that the convolution theorem for this type of functions asserts that if  then
then  , Theorem 2.3 is obtained from equation [2.20] and by using the expansions of
, Theorem 2.3 is obtained from equation [2.20] and by using the expansions of  and
and  into their corresponding Fourier series.
into their corresponding Fourier series.
The case of integration on lines in ℝ3 with equal distances from two given points
Let x and y be two distinct points in ℝ3 and consider the family Π of all lines which have equal distances from these points. Without loss of generality we can assume that x=e3,y=–e3. In this case it can be easily observed that Π is the set of all lines whose distance to the origin is obtained at their intersection point with the XY plane, when considering lines which are not contained in this plane, and also all the lines which are contained in the XY plane. In other words, for each point  in the XY plane we consider the unique hyperplane Hp which passes through p and whose normal is in the direction of
in the XY plane we consider the unique hyperplane Hp which passes through p and whose normal is in the direction of  and then we take all the lines which pass through p and are contained in Hp. Since the family of hyperplanes Hp where
and then we take all the lines which pass through p and are contained in Hp. Since the family of hyperplanes Hp where  is two dimensional and the set of all lines which pass through p and are contained in Hp is one dimensional it follows that dim Π=3 (in case where
is two dimensional and the set of all lines which pass through p and are contained in Hp is one dimensional it follows that dim Π=3 (in case where  then we can take all the lines which pass through p).
then we can take all the lines which pass through p).
Our aim in this section is to recover a continuous function f, defined in ℝ3, in case where we are given the integrals of f on the set of all lines in Π. Since dim Π=3 our problem is well posed. In order to guarantee that inversion formulas are obtainable, when considering integration on lines in Π, we must restrict our family of functions since any function  which is radial with respect to the variable
which is radial with respect to the variable and is odd with respect to the variable x3 produces no signals. However, if we assume that f is compactly supported in the half space x3 > 0 then we can obtain an inversion formula as will be proved in Theorem 2.5 below.
and is odd with respect to the variable x3 produces no signals. However, if we assume that f is compactly supported in the half space x3 > 0 then we can obtain an inversion formula as will be proved in Theorem 2.5 below.
Before formulating Theorem 2.5 we will need first to parameterize the family of lines Π and introduce the Mellin transform. Observe that since Π is invariant with respect to rotations which leave the vector e3 fixed it follows that it is enough to parameterize the subset of lines in Π which are parallel to the YZ plane (and then we take rotations of these lines with respect to the Z axis to obtain the whole set Π). If a line l in this subset has a distance λ≥0 from the origin and its projection to the YZ plane forms an angle θ,– π/2≤θ<π/2 with the Y axis then l has the following parametrization

Hence, we obtain the following parametrization
 [2.21]
[2.21]
for the family Π. If the function G=G(λ,θ,∅) is defined by
 [2.22]
[2.22]
where ℝ+ denotes the ray [0,∞) and dl is the infinitesimal length measure on the line l, then our aim is to express the function f via G.
For a function F, defined in ℝ+, define the Mellin transform  F of F by
F of F by
 [2.23]
[2.23]
where it should be noted that the above integral might not converge for every complex number s satisfying ℜ>0 . For the Mellin transform we have the following inversion formula (see 10, Chap. 8.2)
 [2.24]
[2.24]
where Q>0 . The inversion formula [2.24] is valid for many types of functions whereas in our case we will justify its application in the particular case where F is continuous and has compact support (see Lemma 2.7). We will also need the following scaling property
if  where a > 0 then
where a > 0 then
 [2.25]
[2.25]
see [10], Chap. 8.3). Formula [2.25] is valid in any domain for which the Mellin transforms of F and Fa exist and hence we will have to justify the existence of these transforms, in the corresponding domain, each time this scaling property is used [11]. If F is a function of two variables then we denote by  the Melling transform of F with respect to its ith variable. Finally, for every integer n and complex numbers ζ,ξ define the following integral
the Melling transform of F with respect to its ith variable. Finally, for every integer n and complex numbers ζ,ξ define the following integral
 [2.26]
[2.26]
where In might not converge for every ζ and ξ. Now we can formulate Theorem 2.5.
Theorem 2.5: Let f be a continuous function, defined in ℝ3, which is compactly supported in the half space x3>0 and let G be defined as in [2.22] [12]. Let
 [2.27]
[2.27]
be the Fourier expansions of f and G respectively in the variables ϕ and ∅. Define
where n ' = max(0, n +1), then
 [2.28]
[2.28]
Remark 2.6: When using the Mellin inversion formula [2.24] in equation [2.28] then when using  , for which integration is taken with respect to the variable ζ, the point Q must be taken from the ray [n’,∞] whereas when using
, for which integration is taken with respect to the variable ζ, the point Q must be taken from the ray [n’,∞] whereas when using  , for which integration is taken with respect to the variable ξ, the point Q must be taken from the interval [0,1] [13]. This is to ensure that integration is taken over the domain of definition of
, for which integration is taken with respect to the variable ξ, the point Q must be taken from the interval [0,1] [13]. This is to ensure that integration is taken over the domain of definition of  for which the integral n I converges.
for which the integral n I converges.
Proof of Theorem 2.5: In the domain of definition of the function G let us assume for now that the variable θ is restricted to the interval [0,π/2] [14]. Then, integrating f on the line lλ,θ,Ø with its parametrization given in equation [2.21] and using the expansion [2.27] of f we obtain
 [2.29]
[2.29]
where

and where in the last passage of equation [2.29] we used the fact that f is supported on the half-space x3 > 0 and that sinθ≥0 if 0≤θ≤π/2. The following relation

can be easily checked and thus, assuming that λ≥0 and –π≤∅<π, negative values of θ do not give any new information on f and hence we will assume from now on that θ is given only in the interval [0,π/2]. Now, define the variable so that
 then
then
we have

Hence,

and thus we have
 from which we obtain that
from which we obtain that
 [2.30]
[2.30]
where we denote 
Making the change of variables t’=t cosθ in the right hand side of equation [2.30] we obtain that
 If we denote s=tanθ then since 0≤θ≤π/2 it follows that s≥0 and, since
If we denote s=tanθ then since 0≤θ≤π/2 it follows that s≥0 and, since  in this domain of θ, we can write
in this domain of θ, we can write
 .
.
Hence, if we define  by the following relation
by the following relation and then take the Mellin transform with respect to the variable s on both sides of the last equation we obtain that
and then take the Mellin transform with respect to the variable s on both sides of the last equation we obtain that
 [2.31]
[2.31]
Where λ ≥∣ 0,0 < ℜ(ξ ) <1. The application of the Mellin scaling property [2.25] is justified here since for every λ,t’≥0 the function
is compactly supported in s [since f is compactly supported in ℝ3 and thus obviously gn is compactly supported with respect to both variables r and  ] and thus, using Lemma 2.7 [see the end of this section] [15], it follows that its Mellin transform exists for every ℜξ > 0 . The restriction that 0 <ℜ(ξ ) <1 is to ensure that the integral In, as defined by equation [2.26], which will appear later in the computation, converges.
] and thus, using Lemma 2.7 [see the end of this section] [15], it follows that its Mellin transform exists for every ℜξ > 0 . The restriction that 0 <ℜ(ξ ) <1 is to ensure that the integral In, as defined by equation [2.26], which will appear later in the computation, converges.
Making the change of variables t’=λt in the right hand side of equation [2.31] yields
 [2.32]
[2.32]
Denoting

and then taking the Mellin transform, with respect to the variable λ, on the integral in the right hand side of equation [2.32] and on  yields
yields
where the application of the Mellin scaling property, for the variable λ, can be justified in the exact same way as we previously did for the variable s. Observe that since R(ζ ) > n' and 0 <R(ξ ) <1 then the integral I = In (ζ ξ) converges. Indeed, at t→0+ the integrand behaves like t–ξ and for t→∞ if n≤–1 then n I obviously converges while for n≥0 the integrand behaves like  and In converges also for this case. Dividing both sides of the last equation by In (ζ ξ) and then taking the inverse Mellin transform in both variables ζ and ξ we can obtain Theorem 2.5.
and In converges also for this case. Dividing both sides of the last equation by In (ζ ξ) and then taking the inverse Mellin transform in both variables ζ and ξ we can obtain Theorem 2.5.
The application of the Mellin inversion formula [2.24] for gn and for  can be justified since these functions have compact support in the corresponding variables on which the Mellin transforms are applied [gn is finitely supported in its second variable and is finitely supported in its first variable] [16]. Hence, the justification of these inversion formulas are now an easy consequence of Lemma 2.7.
can be justified since these functions have compact support in the corresponding variables on which the Mellin transforms are applied [gn is finitely supported in its second variable and is finitely supported in its first variable] [16]. Hence, the justification of these inversion formulas are now an easy consequence of Lemma 2.7.
Lemma 2.7: F :ℝ+ →ℝ be a continuous function with compact support. Then, the Mellin transform of F exists on each line  where c > 0 and one can use the Mellin inversion formula [2.24] for Q=c in order to reconstruct F.
where c > 0 and one can use the Mellin inversion formula [2.24] for Q=c in order to reconstruct F.
Proof: Let us evaluate the Mellin transform of F on the line lc. Assume that F is supported inside the interval [0, a ] where a > 0 , then
Where

Since c > 0 it follows that F* is in L1ℝ and thus its Fourier transform exists in ℝ which is equivalent to the fact that the Mellin transform of F exists on the line lc. Inverting F from its Mellin transform [2.23] is equivalent to inverting F* from its Fourier transform and since F is continuous it follows that F* is also continuous and since it is also in L1ℝ then it is well known that one can use the Fourier inversion formula in order to recover F* . This finishes the proof of Lemma 2.7.
REFERENCES
- Radon J. On the Determination of Functions by Their Integral Values of Certain Manifolds. Ber. Verh. Sachs. Akad. Leipzig. Math. Nat. Cl. 1917;69:262-277.
- Cormack AM. Representation of a function by its line integrals, with some radiological applications. J Appl Phys. 1963;34:2722-2727.
- Deans SR. The Radon transform and some of its applications. Dover Publ. Inc., Mineola, New York. 2007.
- Rubin B, Wang Y. New inversion formulas for Radon transforms on affine Grassmannians, arXiv:1610.02109.
- Palamodov VP. Reconstruction from Integral Data. Monographs and Research Notes in Mathematics. CRC Press, Boca Raton. 2016.
- Palamodov VP. Reconstructive integral geometry. Monographs in Mathematics. Birkhauser, Basel. 2004.
- Natterer F. The Mathematics of Computerized Tomography. Wiley, New York. 1986.
- Volchkov VV. Integral Geometry and Convolution Equations. Kluwer Academic, Dordrecht. 2003.
- Agranovsky M, Volchkov VV, Zalcman LA. Conical uniqueness sets for the spherical Radon transform. Bulletin of the London Mathematical Society. 1999;31:231-236.
- Dambaru B, Debnath L. Integral Transforms and Their Applications. CRC Press, New York. 2007.
- Gel'fand IM, Gindikin SG, Graev MI. Selected topics in integral geometry, Translations of Mathematical Monographs. AMS, Providence, RI. 2003.
- Helgason S, Integral geometry and Radon transform. Springer, New York-Dordrecht Heidelberg-London. 2011.
- Helgason S. The Radon Transform, Birkhauser, Basel. 1980.
- Mader P. About the representation of point functions in Euclidean space by plane integrals. Mathematical J. 1927;26:646-652.
- Rubin B. On the Funk-Radon-Helgason inversion method in integral geometry, Cont Math. 2013;599:175-198.
- Rubin B. Reconstruction of functions from their integrals over k dimensional planes, Israel J Math. 2004;141:93-117.