Specific case of an internal control-external control (bounded domain)
Received: 03-Sep-2024, Manuscript No. puljpam-24-7285; Editor assigned: 05-Sep-2024, Pre QC No. puljpam-24-7285(PQ); Accepted Date: Sep 25, 2024; Reviewed: 08-Sep-2024 QC No. puljpam-24-7285(Q); Revised: 13-Sep-2024, Manuscript No. puljpam-24-7285(R); Published: 30-Sep-2024, DOI: 10.37532/2752- 8081.24.8(5).01-03
Citation: Claver YP, Vuginshteyn A, Fuortes G, et al. Specific case of an internal control-external control (bounded domain). J Pure Appl Math.2024; 8(5):1-3
This open-access article is distributed under the terms of the Creative Commons Attribution Non-Commercial License (CC BY-NC) (http://creativecommons.org/licenses/by-nc/4.0/), which permits reuse, distribution and reproduction of the article, provided that the original work is properly cited and the reuse is restricted to noncommercial purposes. For commercial reuse, contact reprints@pulsus.com
Abstract
We try to study the controllability of bounded domain Ω consisting of several heated materials. For this, we will use the functional (μ), whichoptimizes the cost. The objective is to bring the excess heat inside the domain and also on the border of the domain and it’s this excess heat that is a function called control.
Key Words
Prime numbers; Prime conjecture; Graphs; Twin prime conjecture; Sequential prime product
Introduction
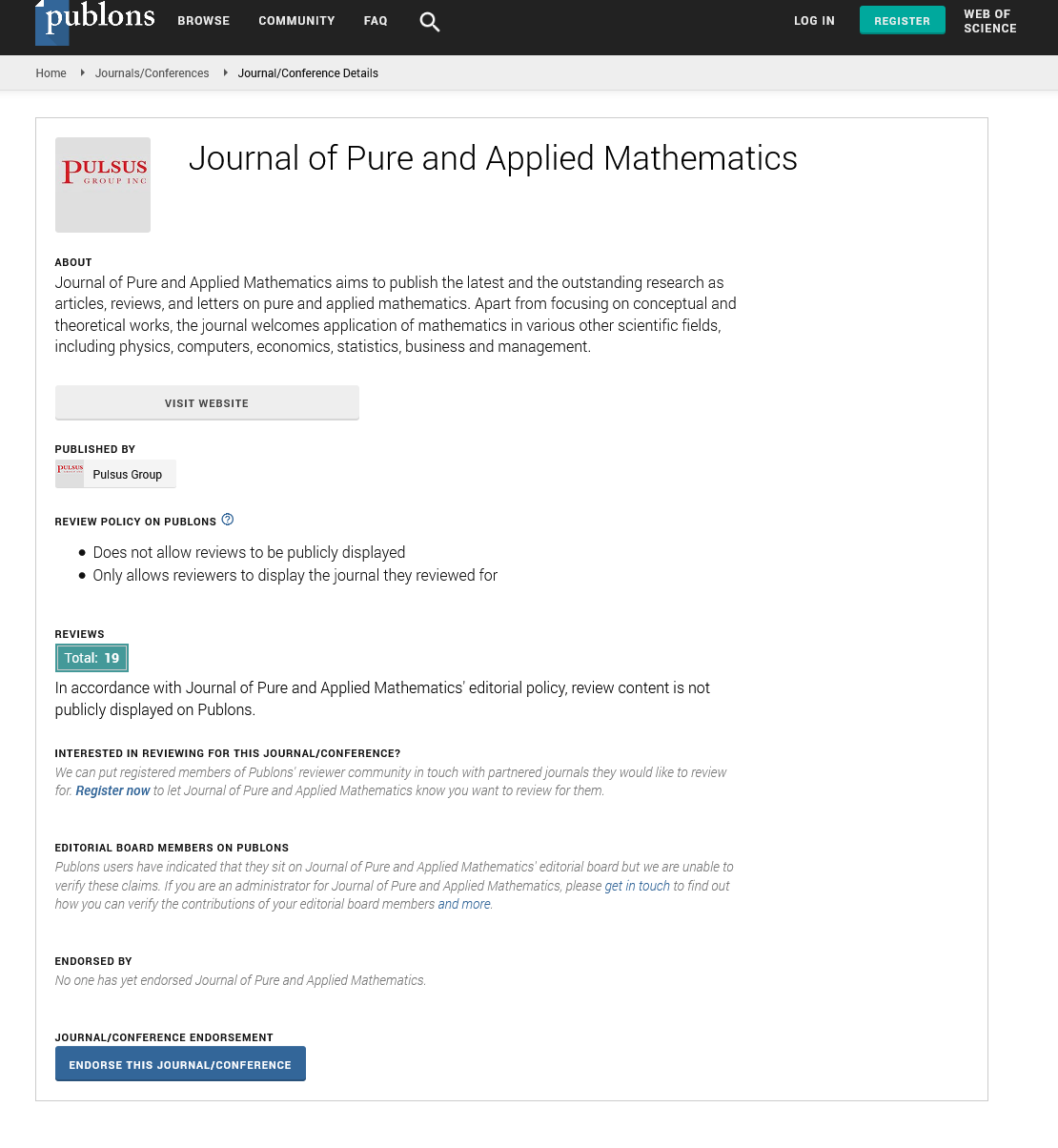
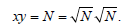
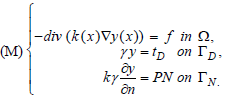
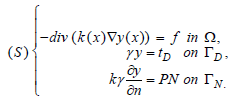
Let Ω be a bounded domain made up of heated materials, we give ourselves the conductivity (x) at the point x ∈ Ω the heat source ƒ in L2(Ω) in the temperature TD imposed on ΓD by the system, the flux PN imposed on TN. Let’s consider the following problem:
Problem
Let yD be a given temperature.
How to act on the system (S) so that y is close enough to yD?
Idea
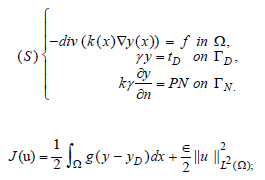
It is a question of bringing a surplus of heat u so that y is as close as possible to yD [1-5]. This excess heat is a function called control [1-5]. To leave a good choice of u, we must optimize the cost, which reflects what we want to achieve and the means at our disposal. What amounts to considering the functional J(u) defined by:

Where g is a definite function of Ω a value in â?. (y-yD) makes is possible to minimize the difference between y and yD, ∈ being very small serves not only to prove the existence and uniqueness of the solution but also to minimize the cost.
Problem
Is there Å« ∈ u such that

1. u is in the set of admissible controls,
2. Å« is the optimal control
3. y= y(Å«) is the optimal state
The function J is the objective function
However, there are two types of controls:
1. Internal control,
2. Border control
NB: we advise you to look at the course material on control for detailed proof.
Internal control
It is a question of bringing the excess heat inside the domain. Let us consider the following example of control:
Let ƒ in L2(Ω), yD belonging to L2(Ω) and u be a nonempty closed convex set of L2(Ω) . Let u∈, (u) be the solution of the following equation.

Let’s pose

So we get the following problem:

Resolution
For any Z in L2(Ω),we know the problem below

Has a unique solution in H10Ω, therefore is the unique solution of problem (11).
We define the following operation:

Were Z is the solution of equation (4). A thus defined is linear and continuous.
We have
L2(Ω),
By replacing (u) by its value in (2), we get:
Where

And  is a constant.
is a constant.
Minimizing the functional J amounts to minimizing the functional J1.
We put

1. a is bilinear,continous,coercive and symmetric,
2. l is continous linear,
3. u a nonempty closed convex set of L2(Ω),
By stampacchia’s theorem, there exists a unique Å« in u solution.
The solution Å« is characterized by:

Having obtained the existence and uniqueness of the solution, we are interested in giving the characteristics of Å«. To do this, we introduce the optimality system. By interpreting, the reaction
The Conjoint state  is the solution of the following problem:
is the solution of the following problem:

We therefore have

We get the following optimality system:
Particular case

In the case of shareholder internal Control, we have
Border control
This is to bring the excess heat to the Boundary of the domain.
Consider
The following boundary control example
Let ƒ in L2(Ω), yD belong to L2(Ω), g a function of L2(T) and u nonempty closed convex of L2(T). Let u∈ u, y(u) be a solution of the following equation:

We pose:

Resolution
Simplification
By setting:
Where y1(u) is the solution of the problem:

And z belongs to H10(Ω) solution de :

System S1 becomes

We pose:
Where

Transposition formula
We associate to (S2) the following transposition equation:

Let ƒ be a function of L2(Ω) ( ) admitting a unique solution, we get from ( )
Considering the following problem:
l is linear and continuous application on L2(Ω) by riesz’s theorem, there exists a unique y ∈ L2(Ω) such that
We define the operator

Replacing
In J(u), We have:
With

We pose
Conclusion
In short, to solve the problem we must optimize the cost according to the goal we are looking for and taking into account the means at our disposal. But the case here requires a good mastery of the solutions of optimal control and some demonstrations to prove the existence, uniqueness and stability of solutions. Also, we give some extensions to our investigation.
References
- Jormakka J. The error in the General Relativity Theory and its cosmological considerations. Preprint, 2024.
- Jormakka J. On the field equation in gravitation. Preprint, 2024.
- Jormakka J. On the field equation in gravitation, part 2. Preprint, 2024.
- Jormakka J. The Essential Questions in Relativity Theory. Preprint, 2023.
- Jormakka J. Failure of the geometrization principle and some cosmological considerations. Preprint, 2023.